When formulated in the language of differential geometry, many physical theories have a structure that is characterized by a series of “stacked” tangent and cotangent spaces:
We have a configuration manifold (M), velocities on the tangent space TM with basis {∂i}, and a cotangent space T^*M with basis {dx^i}. We also have functions on these manifolds, e.g. sections of T^*T^*M to define symplectic structures for mechanics or functions on PT^*M to define contact structures for thermodynamics or optics.
If we have a metric, it creates a natural isomorphism between TM and T^*M through the musical isomorphisms, but a lot of physics can be done without any metric.
I found one article that explains the Hamiltonian case [1]:
They do the same construction as done in differential geometry and define the phase space as: \mathcal{R}^{2n} = \mathcal{R}^n ⊕ \tilde{\mathcal{R}}^n
Then he works on the GA \mathcal{R}_{2n} := \mathcal{G}(\mathcal{R}^{2n}), where the momentum vectors are all orthogonal to the position vectors.
He then defines a symplectic form J=∑e_k ∧ \tilde{e}_k, introduces phase space coordinates x= p+q \cdot J and gets Hamilton’s equation \dot{x} = \tilde{∂}H.
It is all very neat and avoids the difficult constructions of all of the (co)tangent spaces. Instead of having q as a differential, it just enters the coordinates on an equal footing to the position. I wonder what the downsides of this approach are.
[1] Z. Oziewicz et al (eds.), Spinors, Twistors, Clifford Algebras
and Quantum Deformations, Kluwer: Dordercht/Boston (1993), 203–214.
Hamiltonian Mechanics with Geometric Calculus
David Hestenes
To give my 2 cents. The GA approach is equivalent to differential forms + metric as stated above. However, the differential forms are more straightforward when it comes to integration because the dx_i also incorporate measures. Stacking occurs when you compute the Pfaffian and derive the constraints from there.So if A is a 1st order form the elements of the Pfaffian are A → dA → A /\ dA → dA /\ dA.
this of course can be written in GA but there you should use \nabla /\ instead of d.
The main advantage of GA is the fundamental theorem, which allows you to invert the derivative but there you have to be careful in changes of variables.
So geometrically, we think of transitions between lines, surfaces, volumes etc which can have physical interpretations in terms of fields and forces.
We had an interesting discussion on discord for a related question.
This is my feeling about the situation, which hopefully doesn’t offend anyone: GA often feels like "we take a bunch of conventional vectors and marry them through complexification so we can combine them all into one big equation" and DG feels like "we replace the classical vectors with complicated geometric objects and then need very technical math to deal with them"
In this spirit, in the GA formulation, H is either represented as a conventional vector itself without geometrical meaning and just multiplied by some geometric quantity later, as in F = D + I/c H, or one might define a new H as I/cH.
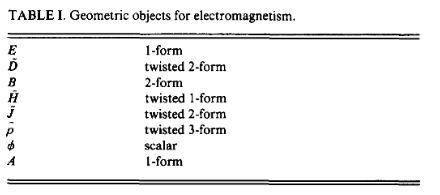
Interestingly, this kind of definition is at odds with Maxwell’s equations, which expect H to be a line integrand, not a bivector.
My Grassmann.jl implementation, papers, and videos discuss higher order tangent spaces and how they fit in with differentjal geometric algebra. I’m a bit tired of explaining myself to random strangers on the internet, so I’m not going to write another explanation here. However, this is all something I already thought about and implemented and discussed with Grassmann.jl, but there is no point in discussing it further online. Yea, you can do “differential geometric algebra” instead of just geometric algebra or differential geometry. It’s simply a matter of introducing differential operators in the correct way. Really not much else to say, once you follow the consequences of that to their conclusions.